Sidecar 模式
前言
Sidecar Pattern
http://diego-pacheco.blogspot.com/2020/07/sidecar-pattern.html
以下是内容翻译。
当我们需要分发一个共享软件时,有几种架构模式可以遵循。我最喜欢和默认的模式是服务模式(Service Pattern)。然而,也有其他的软件分发模式。例如,如果我们考虑到初创企业,有一个流行的工具叫精益商业画布,在那里你可以对你的初创企业的商业模式进行建模,那里有许多维度,但有一个特别的维度叫 “分销渠道”,与本博文的主题高度相关。作为工程师,我们常常只考虑到一个维度,即服务或二进制共享库。然而,我们还可以探索其他维度。其他的选择有:工具、内部服务/自助服务平台、运行时平台和服务网格。所以在这篇博文中,我想多介绍一点 Sidecar 模式。
新现实中的旧想法
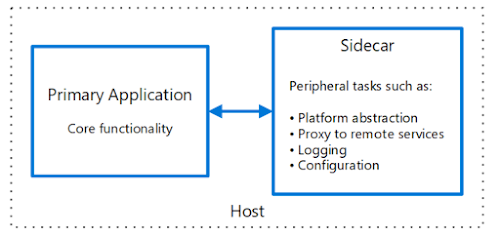
对于 Linux 来说,我们总是有非常小的、专门的程序在后台运行,等待对特定的任务做出反应,这些程序通常被称为 “daemons/守护进程”。对我来说,“daemon” 可能就是最早的 “sidecar”。所以,你可能会想,为什么我们不把守护进程放在首位,而要让自己开心呢?好吧,用C语言编写代码并遵循Linux模式不会给你带来什么,因为有一个不同的现实。现实是,我们在专门的空间和专门的硬件中运行软件。因此,大多数人(在云计算市场上占30%)都在云端运行工作负载,用计算解决方案运行软件,通常是虚拟化的(EC2或谷歌云计算)。然而,现在的趋势和现实是在容器(Docker、Kubernetes、RKT、OCI/OCR等)或甚至 MicroVMs/Serverless 中运行一些工作负载。因此,你有一个专门的内核/操作系统,用于你的软件或甚至专门的硬件。因此,Sidecar 意味着让我们在那里运行一个协同进程,即你将有两个进程。你的应用程序和 Sidecar。
Sidecar 不是解决所有问题的方法。而且,它们也不只适用于 Kubernetes。当然,Kubernetes 使得使用 sidecars 容易得多,因为在 POD 中,sidecar 只是另一个 Docker 容器。 然而,你可以在虚拟机中运行 sidecars。就像 Netflix 多年来使用 Priam、Dynomite Manager、Raigad,以及最近 Lyft 使用 Envoy 那样。
Sidecar架构
为了拥有 sidecar,你可以在你的 sidecar “内部” 拥有任何架构。你可以是RPC,事件驱动,IPC,或者任何你想要的,只要你是从应用运行时路径中剥离出来的。Sidecar 也可以用于瘦客户机模式,这很好,但请记住,Sidecar 的定义是在另一个进程中运行,因此不是嵌入在你的应用程序中。
Sidecars 不是嵌入式的,但也不是远程的。Sidecars 不是微服务,根本不是服务。然而,Sidecar 可以有 HTTP/REST 接口,可以通过 “sudo remote call” 被应用程序调用。我指的是sudo,因为对于应用程序来说,它看起来就像一个远程调用,但是因为 sidecar 是在应用程序的 sidecar 机器上运行,所以延迟要小得多。
Sidecar的优点
Sidecar架构模式有几个好处,比如:
- 隔离:sidecar 和应用程序不在同一个 “运行时进程空间” 中。
- 解耦: sidecar 不与应用程序的选择相耦合,反之亦然。
- 提供安全复用: 意味着没有二进制耦合(共享jar和框架的问题)。
- 封闭性:我们可以有封装的通用代码,可以输送到所有的服务/应用程序。
- 避免二进制耦合:对我来说,这是一个巨大的胜利,因为在规模上二进制耦合是很痛苦的。
- 技术多样性:可以自由选择任何语言、堆栈、lib或框架。
- 更新/部署的独立性:它们可以在应用的CI/CD生命周期中分开发生。
- 没有单点故障:因为每个服务/微服务都有1个sidecar,我们没有单点故障。
- 避免大规模的迁移:由于应用程序代码没有与sidecar耦合,所以没有大规模的代码迁移。
最后,我只想指出,Sidecars 与容器/Kubernetes 完美配合,因为以k8s为例,部署单元是 POD。POD 只是一组共享相同资源的容器,如网络接口和磁盘。这使得创建 sidecar 变得非常容易,因为它只是另一个 docker 容器。
然而,就像我之前说的,你可以在没有容器的情况下拥有 sidecar。这需要你付出更多的部署努力,但并不是不可能或很难。
Sidecar的缺点
就像软件架构中的所有东西一样,也是有取舍的。因此,sidecar 肯定有缺点。让我们来看看其中的一些:
- 如果不在K8s中,就会有更多的部署复杂性(EC2)。
- 需要有很好的可观察性,否则 sidecar 会变成黑盒子。
- 难以对应用进行调试。比方说,sidecar 是用RUST写的,而应用程序是用Java或Go写的。
- 可靠性路径: sidecar 现在成为可靠性路径的一部分。这意味着停机时间可能是一个大问题。
Sidecar 的使用范围很窄,比如说你不会用它来取代SOA中的服务,用于你的商业应用。然而,有一些问题使 Sidecar 成为很好的选择,如代理、路由、可观察性、审计、安全等等。然而,如果你能做一个适当的共享库,并注意依赖性,他们可能是一个更简单和有效的解决方案。
IMHO 拥有像 Go、Rust、Java、Python、C++ 这样的高技术多样性,肯定会使用 sidecar。但是如果你大量使用一种语言,比如说Java,你需要确保这是正确的使用情况。不同的语言和不同的库有不同的优势,所以要仔细分析权衡,因为离开默认语言可能是一个问题。
默认语言(比如说Java)通常意味着你有训练有素的人员来部署、监控、调整和处理复杂的工作负载或云,所以引入另一种语言可能意味着你将是孤独的,或者需要在内部建立这种能力,这超出了纯粹的技术决定,意味着还有更多。
何时使用sidecar
一个好的指标是有一个跨领域的关注,而不是你的业务逻辑,如可观察性、安全性、性能、可靠性、审计和基础设施/运维。另一个考虑点是,你可能想避免与应用程序的二进制耦合。另外,假设你真的会获得性能,或者你有其他语言的工具更适合这项工作,或者更快、更简单。
如果你的用例符合我上面描述的要求和架构目标,那么我认为你真的应该考虑把 sidecar 作为你的解决方案。
何时应避免使用边车
如果你需要极强的性能和超低的延迟,做一个 lib 肯定会比 sidecar 快,因为你会在应用程序上运行嵌入式。你需要仔细分析这些权衡,因为还有其他的东西可以让你的 sidecar 高效,比如使用IPC、反应式编程、像Rust这样的高性能语言。另一个避免使用 sidecar 的标准可能是,最终的解决方案并不复杂,或者 sidecar 的基础设施价格并不划算(假设你不是在K8s上运行,而是在Ec2上)。
如果你需要在应用程序之外扩展 sidecar,使用 sidecar 可能不是一个好主意。然而,你总是可以使用其他的外部组件来获得扩展性,如数据库和缓存,但你仍然需要考虑这个问题。特别是当工作负载主要发生在 sidecar 上的时候。
Sidecar是一个非常有趣的架构模式,我们可以在云原生应用程序中使用。然而,我们需要重新考虑使 “sidecar所有的东西”,否则我们不会有好处。请记住,没有一个放之四海而皆准的东西。